The last issue that I had running the 1401 diagnostic (aside from Console I/O input working in neither 1410 nor 1401 mode) was “ERR ?3S” in diagnostic M011A, which corresponds to diagnostic location 07032 (the routine actually starts at location 06980). This is test RN111, the very last test in the diagnostic.
The diagnostic comment block says it all:
RN111 TURN ON OVFVLW IND WITH ADD INSTR EXECUTE BR INSTR WITH UNITS PSN OF A ADDR CONTAINING Z TEST FOR OVLW IND STILL ON
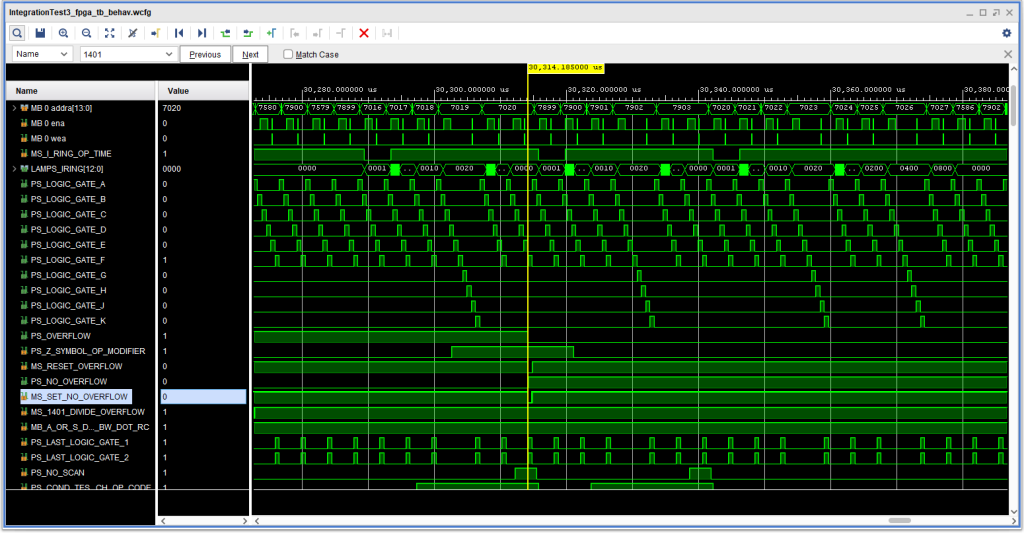
Trouble was, the overflow indicator was indeed off after executing the branch instruction at location 7016 (which branches to location 7899, which was set up to just branch right back to location 7020.) What is so special about the “Z”? Well, it turns out the “Z” is the d-character for a B(I)Z instruction – branch on overflow (a sample of which is at location 7027). But why should that ever be in the Op Modifier register for an unconditional branch instruction that has no “d” character?
Well, it turns out that the 1401 mode instruction readout often places a character from the address into the Op Modifier register, as noted in the IBM 1401-1410 Compatibility CE Instructional Manual, Figure 3B on page 9.
There were a few possibilities for this problem, and a few possible cures for this. In the end, some simulation runs demonstrated that the reset occurred because “Z” was indeed still in the Op Modifier register when the unconditional branch was set up.
Simulation trace showing the Overflow indicator being reset during readout of a Branch Unconditional instruction with “Z” as the last character of the address.
There were several possible cures that might have fixed this, focused on the fact that in a normal B(I)d conditional branch the d character is read out later in the I cycle – so maybe one could reset the Op Modifier register after the address was read out and the following character had a word mark – indicating that the branch had not “d” character at all. But in thinking about it I wondered why this very specific test was in the diagnostic – and as the last test, which maybe meant this was an issue that was uncovered in the field (and perhaps only on machines with the Accelerator special feature).
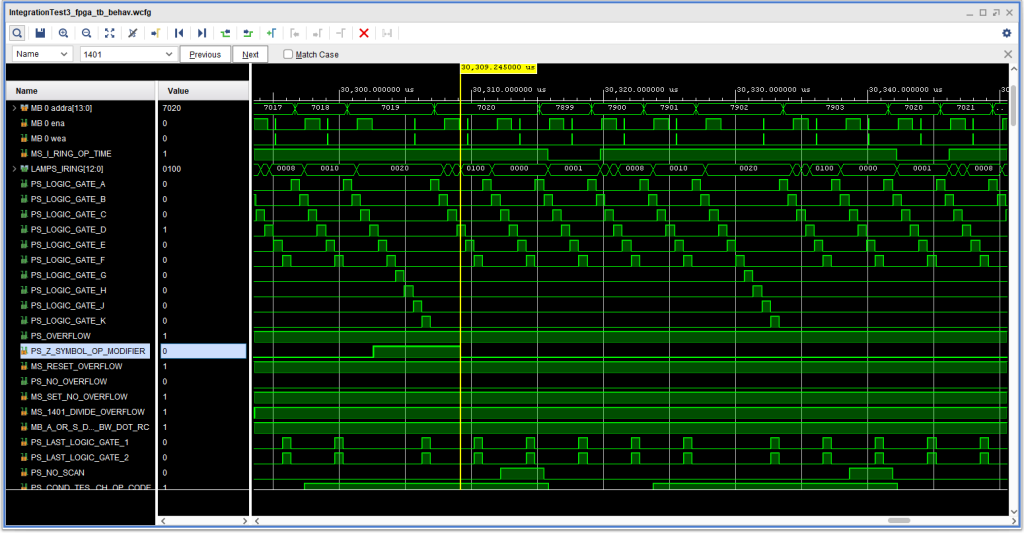
The reset of the Op Modifier register is controlled on ALD 15.38.04.1. Interestingly, a very relevant signal, +S CHAR TEST BRANCH OP CODE that this page says originates on page 13.13.05.1, does not show up on page 15.38.04.1 as a destination. I had had to “add” that signal into the signal list when I came to page 15.38.04.1 when I entered the data for that page into the database. Perhaps more interestingly, the Instructional Logic Diagram for this ALD, part of ILD Figure 26, shows the signal as instead being +S 1401 COND TEST OP CODE , and is designed to reset the Op Modifier register when:
+S 1401 COND TEST OP CODE is active AND
In 1401 Mode AND
The B Channel has a WM Bit (i.e., end of the instruction) AND
Logic Gate D AND
I Ring 8 Time
Well gee whiz… this was exactly the kind of signal I was looking for to fix this problem. So, to fix it, all I did was change +S CHAR TEST BRANCH OP CODE on the ALD to the one the ILD specified, +S 1401 COND TEST OP CODE, and the problem was cured, with no side effects causing other problems.
Simulation trace showing the reset of the Op Modifier register during I8 time during readout of an unconditional branch instruction.
So this was presumably a case of either a) a mismatch between a page denoting it is for the ACC feature (15.38.04.1) and the source page of 13.13.05.1 which does not call out the ACC feature, or, perhaps, page 15.38.04.1 being “down level” – not having a necessary ECO t fix this. When I did the change, I set up an “ECO” JRJ005 in the database.
With this, the 1401 diagnostic M011A runs to completion without errors, as does the 1410 CPU diagnostic CU01.
During this testing, however, I discovered an issue affecting both 1410 and 1401 mode: Console I/O Input does not work – the characters don’t seem to make it into “core”, and when Inquiry Release is pressed, the I/O operation does not complete. This could be something as simple as a support console software bug or, more likely, an issue in the interface between the 1415 console emulation VHDL and the 1411 CPU Channel, since 1415 Console Input during console control operations (setting addresses, memory data, etc. all seem to work mostly OK). Time will tell.
So, not the yummy treats, but a new problem that showed up with the SAR instruction.
The fix to ERR 60J was pretty easy. That was a gate for feature S10 – a 10K 1410 that needed removing (and its output replaced by a logic ‘1’) on page 14.30.05.1. QED.
However, after fixing that, I then experienced an error near another Store A Address (SAR) instruction, at (just before) location 8624, exhibiting A Channel, Assembly Channel and Address Exit validity checks, with garbage in the B Address Register. However, when I ran the same instructions in the same place in the address space (but with memory otherwise all blanks) it seemed to work just fine. How could this be?
The first blind alley was either that the print chain used for the diagnostic listing printed the 1410 characters “?” and “!” as “&” and “-” respectively, or there was a bug in the listing version that was fixed on tape. So much for that hypothesis.
To figure this out it would be best if I could get it to fail under simulation (There is a scoping capability in the FPGA as well – but not as quick and easy to use.) As mentioned above, during initial testing for this problem, I just loaded the relevant instructions into the appropriate memory locations with memory from 10K up to 40K being blank characters and the failure did not occur. Further more, during testing I discovered that if I had only loaded the first 10K of the 1410 1401 mode diagnostic, M011, as the listing only went up to just under 9K, this problem also did not occur, and the only error ?3S (translated into address 07032). However, that diagnostic is ordinarily loaded from the 1410 diagnostic program TC50, and when I used the image that I have that goes up to 40K, all heck broke loose with the error noted above. I then changed my memory initialization to all ‘9’ characters aside from the instructions under test and was able to reproduce the issue under simulation.
This led me to an initial suspicion that something must be causing more than one B character register from “core” to read out simultaneously. Only one is supposed to read out at a time – and their outputs are OR’d together. If more than one read out at the same time, the results would be problematic. But how was this occuring?
After many simulation runs looking at various signals and what might be going on, I finally hit upon this one.
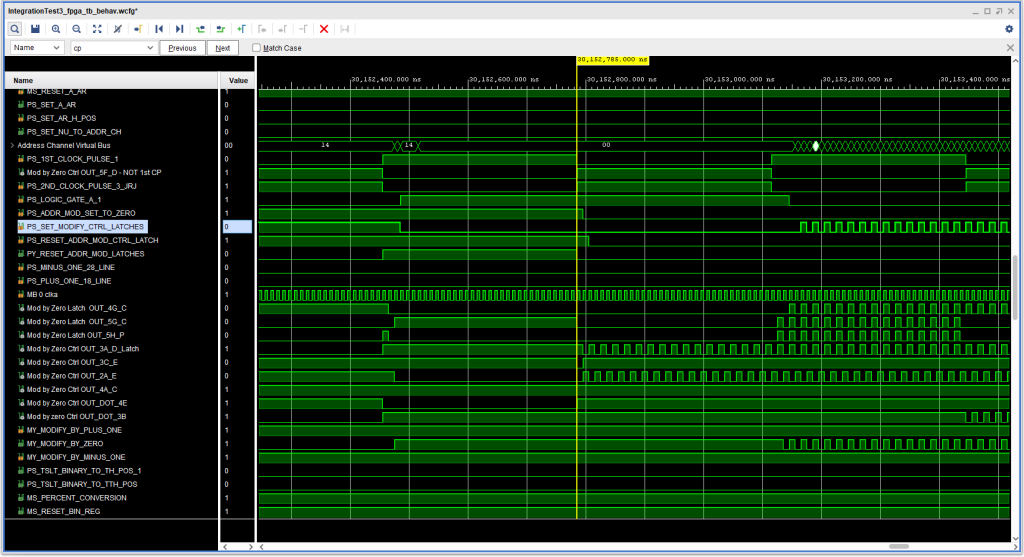
IBM 1410 1401 SAR Instruction Set / Reset Race with ‘9’s in 10K-40K
Looking at the timing diagram one can see signal -Y MODIFY BY ZERO essentially “oscillating” starting shortly after 30.153 milliseconds. That in turn caused the Ten Thousands position to change quickly, resulting in the issues as that position is used to select among the B character registers from memory. That latch “oscillation” then in turn set up problems all over the place, particularly in the Address Channel.
Looking again at the same timing diagram, one might notice that +S ADDR MOD SET TO ZERO and +S RESET ADDR MOD CTRL LATCH are both active when +S RESET ADDR MOD LATCHES becomes inactive. Those two signals both impact the Modify By Zero CTRL latch at blocks 3A and 2A of ALD page 14.30.09.1, resulting in the signals trying to simultaneously set and reset that latch – a pair of cross connected NAND gates – a typical R/S latch. This is a big nono.
In my ALD page generation, these latches are recognized, and “D” flip flops are added after each gate involved. So instead of being undefined, in this kind of situation a kind of “oscillation” is set up at about 1/2 the FPGA clock speed of 100MHz (which is also the memory clock signal “MB 0 clka” in the diagram).
The general approach I took to fixing this was to either a) prevent a set during a time when the reset signal was present or b) prevent a reset during a time when the set signal was present.
To try the first approach, I added the +S ADDR MOD SET TO ZERO signal as an input to get logic block at 3C on page 14.30.09.1. This was done directly in the VHDL – much quicker than puzzling out where to find/fudge a logic block to add to the equation and test – especially if, as in this case, the fix doesn’t work. So, apparently this situation really needed to do a Modify Address by Zero operation (which it did: this, like the previous problem, occurred while copying the contents of the A Address Register to the B Address Register.)
So, then I went to the other approach, (undoing the first one), which was to add the +S ADDR MOD SET TO ZERO signal in so as to inhibit a reset while it was active. That indeed fixed the problem, and the change to the ALD was very easy: all I had to do was add the +S ADDR MOD SET TO ZERO signal into the existing “wired OR” at ALD coordinate 4E, as “ECO” JRJ004.
As for the original 1410 implementation, this could easily be another case where the fast FPGA logic causes an issue that never cropped up in the real hardware.
After doing this, the diagnostic worked OK except for the ERR ?3S. (I have not yet tried the manual part of M011 – testing the sense switches, etc.).
Having fixed the 1401 Store B Register instruction and gotten further in the 1410 1401 mode diagnostic program M011, it was time to look at the Store A Address Register (SAR) instruction again.
The CE Instruction materials say:
“Therefore the A address left from the previous operation must move to the BAR before the new A address reads in. This is done during a B cycle that occurs just after the Q-op is detected at I-op time.”
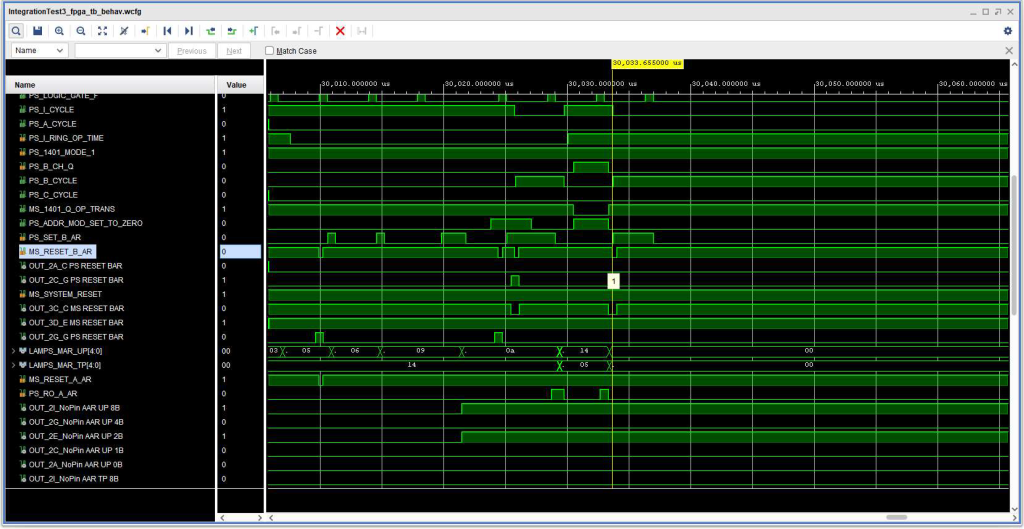
The first timing diagram, below shows that the +S RO A AR signal that presumably ought to be making the AAR contents available becomes inactive before the BAR is reset, so the BAR never receives valid contents – it ends up with invalid binary zeros. (In the 1410, the address registers contain 2 out of 5 code – and having no bits set at all is invalid.) The result was a number of errors, halting the CPU, as would be expected – B Channel, Address Channel, and B Character Select (because the resulting memory address was invalid, none of the 10K “core” modules was selected.
Timing diagram showing issue reading out A Address when setting B Address
There is a signal which looks like maybe it was intended to force the readout of the A Address Register – -S 1401 Q OP TRANS, however once the B cycle starts, the B Character register was cleared and so the signals that relied on – the “Q” character with at wordmark were no there once the B data register was reset early in the B Cycle.
This does not seem to be a race condition. Rather, I suspect it is resulting from the fact that some of the pages for the signals involved are for a 1410 with the accelerator feature, and some without. My hunch is that on a 1410 with the accelerator feature, all of the needed activities to copy the AAR to the BAR occur during the I OP cycle, driven by the -S 1401 Q OP TRANS signal. However, when I tried to force it that way, I was not successful.
To work around the problem, I added logic to ALD page 14.71.30.1 (A Address Register Readout) to read out the AAR when signals +S 1401 MODE 1 AND +S STORE A AR OP CODE AND +S B CYCLE CONTROL are all active. The result was the timing diagram below (sorry that it is only half of the signals, but the important ones are there.) With that change, the +S RO AAR is active through the necessary part of the B Cycle so that the contents of the AAR are properly transferred to the BAR.
Timing diagram showing fix to page 14.71.30.1 to read out AAR when setting BAR during B Cycle.
With that fix in place, the diagnostics mostly run but fail with console error message “ERR 601J”. So, on to the next fix…
With the 1410 mode CPU running correctly, it was time to test out the 1401 side of things. The 1410 has a toggle switch, allowing the CPU to run as an IBM 1401 compatible with most 1401 programs. The 1410 and 1401 are similar, architecturally. The biggest difference is that the 1401 uses 3 character addresses, with the zone bits over the units and hundreds positions in order to address up to 16,000 characters, whereas the 1410 uses 4 character addresses, capable of addressing memory up to 100,000 characters.
The primary 1401 diagnostic is M011. Once I figured out a problem involving the 1401 addressing scheme, I turned my attention to the next failure: The Store A Address Register (SAR) instruction died a horrible death with B Channel, Address Channel and B Character Select Errors. That problem manifested as a failure to copy the A Address Register to the B Address Register for storing later. I tried for a bit to fix this first, but was not immediately successful, so I decided to try and NOP out the uses of SAR, that mostly had to do with storing the address of each test so it could print out a failure message.
Having done so, the next problem quickly cropped up: the partner instruction for the B address register, Store B Address Register (SBR) also failed – it is essentially the same as SAR, but without that first step of transferring the AAR to the BAR. And the failure error was different as well: an Address Chanel Exit error. The ALD for this circuit is 18.14.02.1 . The ILD is on figure 59 at coordinate 2B – however there is also an error in that ILD. It shows the GateOff input to trigger DEZ as ground (the usual ground symbol). However, on the ALD, the F input it connect to M, which is -12 Volts, and in my scheme, that is logic 0. (Logic 1 being 0V).
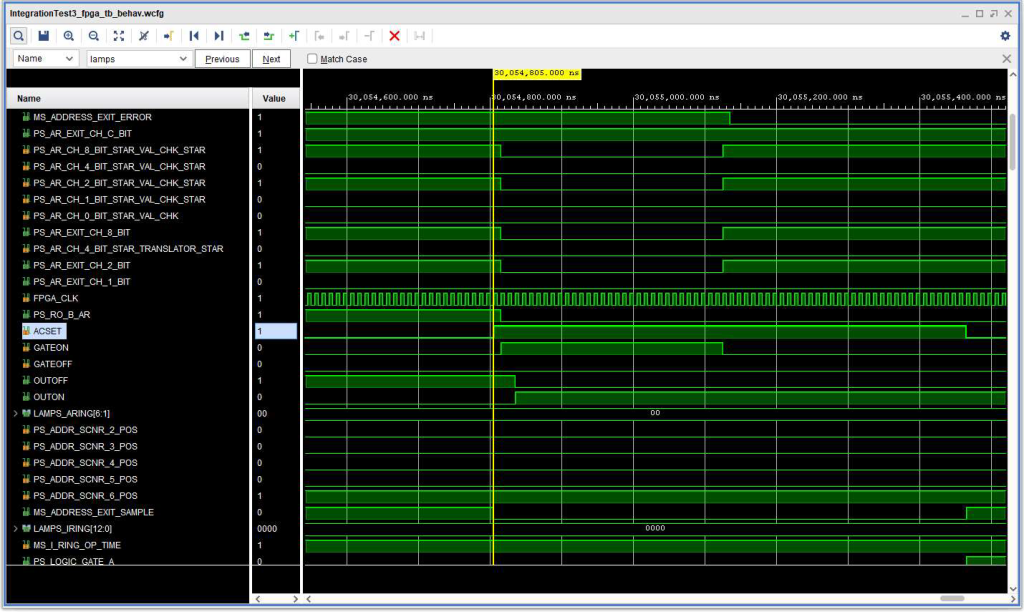
The timing diagram below shows the timing issue. The B Address Register read out and validity check look like they are OK with respect to the Address Exit flip flop ACSET signal. However, the problem was that the VHDL for implementing the SMS card type DEZ has a 3 clock cycle “silo” for ACSET, so that the flip flop is not really set until 3 clock cycles after its ACSET input. In addition, there was no such silo for the other inputs. This silo was put in place to give the ACSET signal some noise immunity – so that a 1 cycle glitch would not set the trigger. But the fact that the other inputs did not have a silo meant that they were sampled 3 clock cycles (FPGA_CLK) after ACSET, and by that time the B Address Register Readout signal (PS_RO_B_AR, i.e. +S RO B AR) had become inactive.
Delay in the Address Exit Check inputs with respect to the readout of the B address Register, resulting in an Address Exit Check.
The relevant VHDL looked like this:
SMS_DEZ_PROCESS: process(FPGA_CLK, ACSET, DCSET, DCRESET, DCRFORCE, DCSFORCE)
begin
if(rising_edge(FPGA_CLK)) then
if(DCRESET = '0' OR DCRFORCE = '1') then
OUTOFF <= '1';
OUTON <= '0';
SSTAGE1 <= ACSET;
SSTAGE2 <= ACSET;
SSTAGE3 <= ACSET;
elsif(DCSET = '0' OR DCSFORCE = '1') then
OUTON <= '1';
OUTOFF <= '0';
SSTAGE1 <= ACSET;
SSTAGE2 <= ACSET;
SSTAGE3 <= ACSET;
else
SSTAGE1 <= ACSET;
SSTAGE2 <= SSTAGE1;
SSTAGE3 <= SSTAGE2;
if(GATEON = '1' AND SSTAGE2 = '1' AND
SSTAGE1 = '1' AND SSTAGE3 = '0') then
OUTON <= '1';
OUTOFF <= '0';
elsif(GATEOFF = '1' AND SSTAGE2 = '1' AND
SSTAGE1 = '1' AND SSTAGE3 = '0') then
OUTOFF <= '1';
OUTON <= '0';
end if;
end if;
end if;
end process;
Once I realized what was going on, the fix was pretty easy. Just add a 3 clock silo for the inputs as well as ACSET. I took the conservative approach, however, and created a separate special instance of SMS_DEZ.vhdl, called SMS_DEZ_SYNC.vhdl to use in the Address Exit validity check logic. This new implementation of DEZ would probably work fine across the board, but I am just using it in the one place, for now.
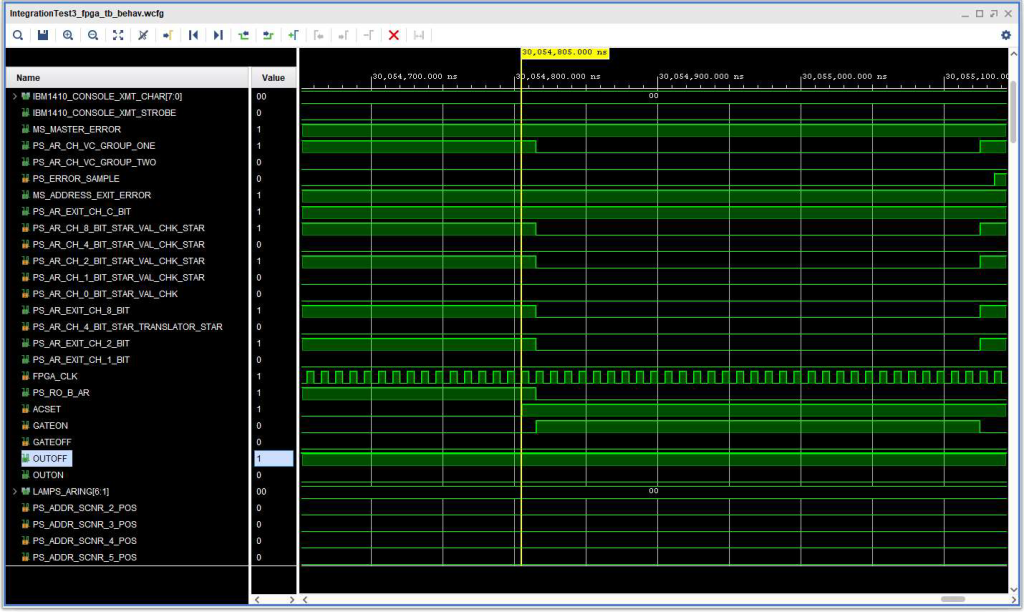
The timing diagram below shows that now the OUTON signal does not activate – no Address Exit Check, because now the inputs are sampled at the same time as ACSET, and those inputs are still active from the B Address Register readout.
Timing diagram for 1401 mode SBR after fixes.
The relevant VHDL looks like this, for gate type SMS_DEZ_SYNC:
SMS_DEZ_PROCESS: process(FPGA_CLK, ACSET, DCSET, DCRESET, DCRFORCE, DCSFORCE)
begin
if(rising_edge(FPGA_CLK)) then
if(DCRESET = '0' OR DCRFORCE = '1') then
OUTOFF <= '1';
OUTON <= '0';
SSTAGE1 <= ACSET;
SSTAGE2 <= ACSET;
SSTAGE3 <= ACSET;
GON1 <= GATEON;
GON2 <= GATEON;
GON3 <= GATEON;
GOFF1 <= GATEOFF;
GOFF2 <= GATEOFF;
GOFF3 <= GATEOFF;
elsif(DCSET = '0' OR DCSFORCE = '1') then
OUTON <= '1';
OUTOFF <= '0';
SSTAGE1 <= ACSET;
SSTAGE2 <= ACSET;
SSTAGE3 <= ACSET;
GON1 <= GATEON;
GON2 <= GATEON;
GON3 <= GATEON;
GOFF1 <= GATEOFF;
GOFF2 <= GATEOFF;
GOFF3 <= GATEOFF;
else
SSTAGE1 <= ACSET;
SSTAGE2 <= SSTAGE1;
SSTAGE3 <= SSTAGE2;
GON1 <= GATEON;
GON2 <= GON1;
GON3 <= GON2;
GOFF1 <= GATEOFF;
GOFF2 <= GOFF1;
GOFF3 <= GOFF2;
if(GON3 = '1' AND GON2 = '1' AND GON1 = '1' AND GATEON = '1' AND
SSTAGE2 = '1' AND SSTAGE1 = '1' AND SSTAGE3 = '0') then
OUTON <= '1';
OUTOFF <= '0';
elsif(GOFF3 = '1' AND GOFF2 = '1' AND GOFF1 = '1' and GATEOFF = '1' AND
SSTAGE2 = '1' AND SSTAGE1 = '1' AND SSTAGE3 = '0') then
OUTOFF <= '1';
OUTON <= '0';
end if;
end if;
end if;
end process;
With that out of the way, I could run M011 diagnostics quite far into the tests, until it needed to use the SAR instruction for more than just tracking the test address.
Having fixed the problem with the space, I continued to test out the IBM 1410 in 1401 mode. At first, I had thought that it was getting quite far in the diagnostic M011 – it would error out with the I register (instruction counter) at 6029. I spent the better part of a day chasing down an apparent problem with the Store A Address Register (SAR – opcode Q) instruction at the indicate location. However, when I placed a halt at the test before that, it still failed at the same place. How could that be?
So, I decided it would be worth the trouble to run the 1401 diagnostic in Instruction Fetch/Execute mode (I/E). The problem became apparent much more quickly than I had anticipated. After halting at the halt and branch instruction at location 2018, it ended up trying to fetch an instruction at a location near 06020. (My memory is just a little fuzzy on when that flying leap actually occurred, and I don’t have the output anymore.)
As you may know, the 1410 has 5 digit addresses, whereas the 1401 used 3 digit addresses plus zone bits to address up to 16K of memory. It was clear that somehow the translation from the 1401 style address to the 1410 address register had gone awry.
A little digging reminded me that there was one page of the automated logic diagrams (ALDs) associated with this translation, part of what is called the “Zone Adder” that was missing – page 14.18.04.1. After some time working with the xsim simulator under Vivado, I began to suspect a problem with my re-creation of the logic from that page.
Input “A”: -S ZONE ADDER A A DOT B A
Input “B”: +S ZONE ADDER B BITS EVEN
Output “O”: +S A NOT A DOT B A DOT B BITS EVEN
The output name is sufficiently complicated that the equation for this is not self-evident. Looking at the ILD figure 55, it looks like the following should be the equation:
O <= NOT A and NOT B — The NOT A is because A, above is -S not +S
Interestingly, page 14.18.04.1 is not referenced at all in the 1410 1401 Compatibility manual on page 7. On both the ILD and that manual, this signal is routed to the middle of a logical OR gate labeled “Zone Adder Carry”, which is laid out on page 14.18.06.1.
Regardless this VHDL caused the problem noted above. However, I had also penciled in on the ILD an additional inverter, which would be the signal without the added inverter (double negative and all that…). For that, the equation would be:
O <= NOT(NOT A and NOT B)
And it actually takes one less “fudged” gate, because the SDRTL provides this result outright.
It turns out that removing that inverter from the logic for that ALD (and thus implementing this second equation) cured that particular problem, both under xsim and running on the FPGA. But, at least superficially, this makes it look like it does not match the ILD — at least at first.
However, and finally, examining the page to which this signal is routed, 14.18.06.1, one sees that it is routed to a logical OR (physical NAND) gate where -S / -B active inputs generated the +S active output. So if one takes the two together, the end result is such that it does match the ILD.
The diagnostic didn’t get very much further, however, and now fails at location 2032 on a SAR instruction, similar to the failure after the “flying leap” problem, just at a different location. SAR is interesting in that it first copies the A Address Register to the B Address Register, and that is apparently failing.
No, not that kind of cadet. Unlike the IBM 1620, the IBM 1410 does have adder circuits for doing addition (and multiplication and division as well). Instead, this issue had to do with the IBM 1415 space function.
I had thought that the principle instruction diagnostic, CU01, was working perfectly, but it was not quite so. I had noticed that even after finishing the diagnostic, I kept getting space characters sent to the PC support program, but figured that was just a software bug somewhere. However, when I started to run IBM 1410 1401 compatibility diagnostic M011, it stopped typing its instructional message to switch to 1401 mode on the console when it hit the first space character.
After some sleuthing, I discovered that the console typewriter logic never asked the channel for the character after the space – it just kept sending that space to the console typewriter again and again and again.
As one might expect, the issue turned out to be in the console typewriter Selectric emulation VHDL code. I had miss-interpreted the signal -V CON PRINTER SPACE NO to just involve console input via the space bar. a closer look at the related automated logic diagrams (ALDs) made me realize that in fact this was also the Selectric’s way of telling the 1411 that the space process had been completed, and that it really had nothing to do with input from the space bar.
At first I tried to just use the relevant states of the finite state machine (FSM) that controls spacing. That did not work right, however, because that same FSM also controls back-spacing. Qualifying the logic signal to only be active during a space, but not backspace, operation filled the bill.
Once the 1415 console emulation was up and running, I was able to run diagnostics. The first set of diagnostic failures arose in the Assembly Channel because the Automated Logic Diagrams I had for parts of the Assembly Channel were not for the 1410 Accelerator feature, unlike the vast majority of ALD pages I had.
Once I fixed that, diagnostic CU01 ran OK in non-overlapped non-priority (interrupt) mode. However, once I enabled overlapped I/O with the priority feature in the diagnostic settings, the diagnostic errored out with an Instruction Check. The overlapped I/O is that of the 1415 console. The diagnostic then monitors that (along with a priority interrupt) to make sure that the channel status information and the interrupt operate as expected.
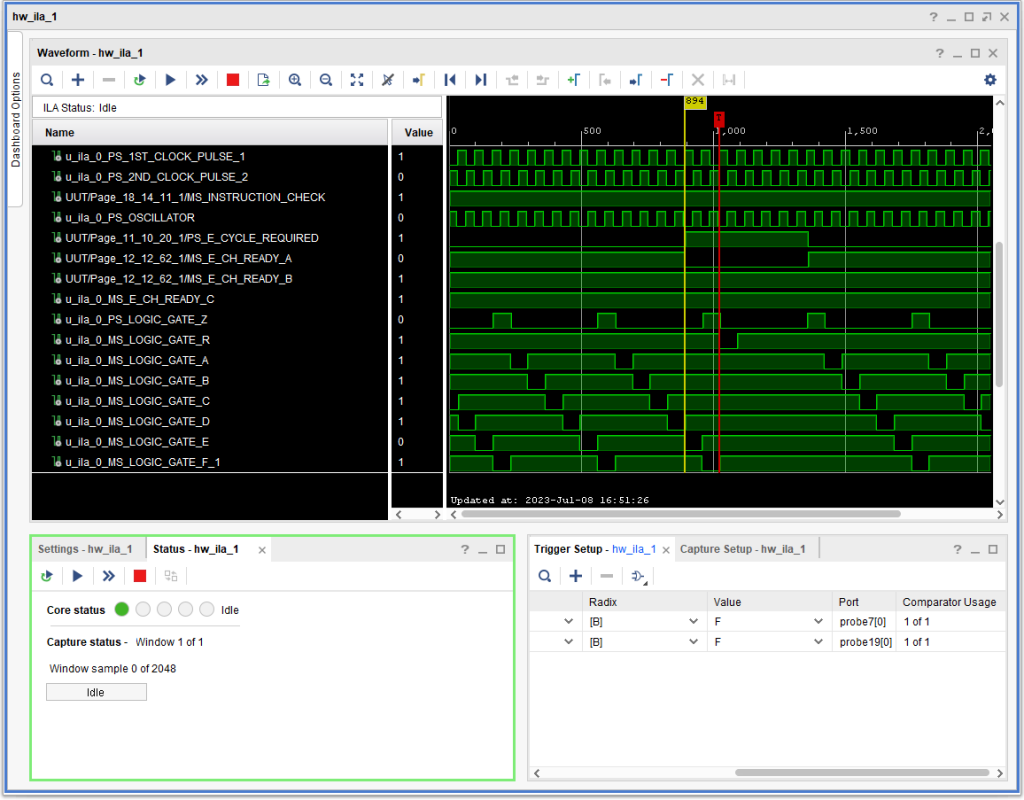
The Assembly Channel issue had been reproducible using a single instruction, and I could set that instruction in the initialization of the first 10K memory module, so I was able to troubleshoot it using simulation. But not this one – it happens after 10s of thousands of instructions. I had been less than confident about using the built-in logic analyzer capability that Vivado affords for Xilinx chips, but this problem left me no choice. Fortunately, after just one false start, I was able to figure out how to make a change in the signals the logic analyzer had available, set triggers, and so on – so, not so bad.
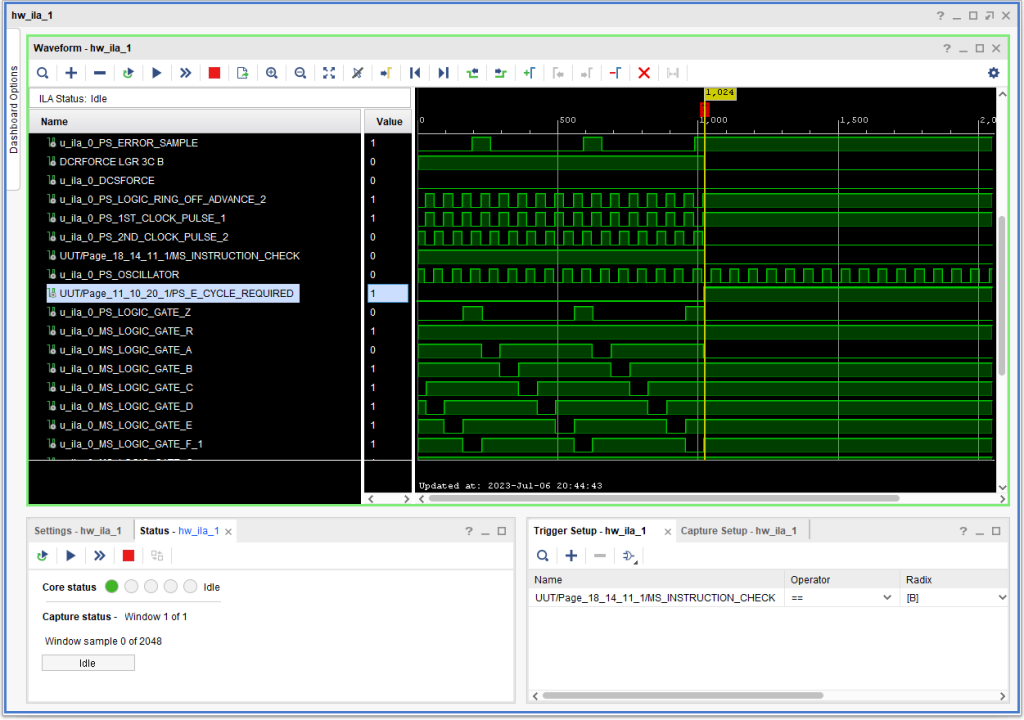
Here is what the problem looked like that caused the Instruction Check. Note that the signal +S E CYCLE REQUIRED is going active (high) just after signal -S LOGIC GATE A. Now, that should not be a problem, except that +S ERROR SAMPLE is also high at this point, and since Logic Gate A is active, as well as E Cycle Required, the logic in the CPU sees that as a possible problem – knowing that if E Cycle Required is active, it ought to be activating Logic Gate R rather than Logic Gate A. (Note: At this point I had not included +S E CYCLE REQUIRED A (one of four different ways that +S E CYCLE REQUIRED can be asserted – and which turned out to be the “villan” in this case. Anyway, here is what the output of the logic analyzer looked like:
E Cycle Required Request with a Race Condition
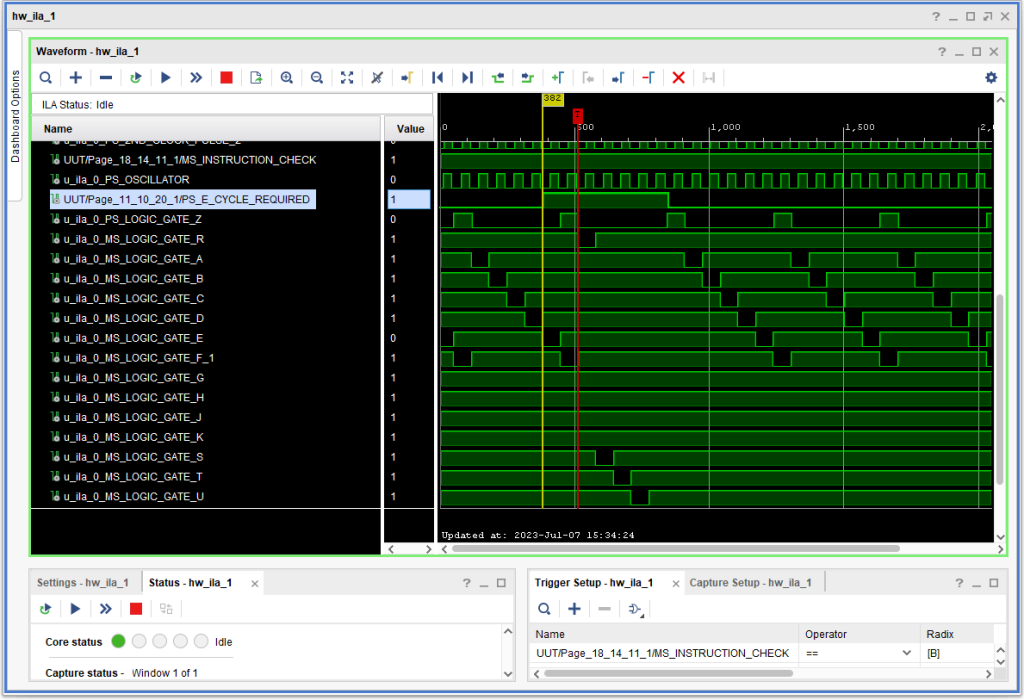
Now, this was not occurring on all or even anywhere near a majority of overlapped I/O operations. Below is an example (using the very same FPGA configuration) of a successful overlap. Note that in this example, +S E CYCLE REQUIRED is asserted much earlier – along with -S LOGIC GATE E so there is no race – E Cycle Required is ready and present long before the time of+S LOGIC GATE Z when the CPU makes the decision between Logic Gate A and Logic Gate R is made.
IBM 1410 FPGA Overlapped I/O Cycle With No Race Condition
So, I went looking for possibilities:
Had I made a mistake when I entered the data for the associated ALDs?
Was this a race condition caused by the fact that I insert “D” flip flops to disconnect any timing loop identified by my generation code (within a single ALD) or by Vivado during synthesis (involving multiple ALDs)?
Was this a race condition caused because the FPGA gates are much faster than the original RTL logic SMS cards, and/or the fact that LUTs are used to collapse combinatorial logic into a decision table that may eliminate multiple levels of original gates?
Was this a very tight timing window in the original CPU?
During my investigation I came upon this tidbit in manual 226-2692, IBM Customer Engineering Instruction-Reference 1411 Input-Output Operations on page 46:
Service Note Because close timing conditions occur in the areas listed below, excessive delay, or accumulated delays in the logic circuits may cause machine failures: CHANNEL REGISTERS AND CONTROLS E-cycle required F-cycle required E-cycle control F-cycle control Address channel
Well, do any of those look familiar? Like maybe the italicized one? While I have resolved the issue, I do not know, for sure, the exact nature of why I ran into it. The original CPU had the +S E CYCLE REQUIRED signal originating in (physical) Frame “D”, whereas the logic gate signals are created in Frame “C”, a couple of feet apart. As a guess I think it is most likely the the FPGA logic is faster than the original hardware in this area, such that +S E CYCLE REQUIRED could be being asserted earlier than the original engineers thought probable.
Regardless, I faced the issue of what to do about it. I had several choices:
I could try and tweak my generated logic in terms of speed, by adding delays, to see if I could resolve it that way.
I could inhibit +S E CYCLE REQUIRED A (the one that seemed problematic) in the presence of -S LOGIC GATE A so that in such a case, the E Cycle Required signal would not be asserted until near the end of the memory cycle of this enar miss.
I could inhibit +S E CYCLE REQUIRED (so, all four possibilities) in the presence of -S LOGIC GATE A
The first two choices might work, but would leave me in a situation where this problem could recur later on, in some other setting, whereas the third option would prevent it from happening a priori. The only downside that I could see would be that it might prevent a device from transferring data to memory quite as fast as the original.
So I investigated transfer speeds of various devices to see what they might be like:
Unit record devices have a core buffer in the IBM 1414 I/O Synchronizer, and are slow enough anyway, that it would not likely make any observable difference.
IBM 729 tape drives. The 729 IV transfers at 112.5 IPS at 556 CPI, the 729 VI at 112.6 IPS at 800 CPI. So, roughly, 112.6*800 = 90,080 cps, or a bit over 11 micro-seconds per character. So, every other cycle would be fine on a an 1410 with the Accelerator feature with 4.0 microsecond cycles – allowing it to “steal” every other core cycle.
IBM 7340 Hypertape Drives. Some models are 112.5 IPS / 170,000 cps tape drives (so, roughly 1500 CPI), or 5.9 microseconds/character. That would require making transfers in non-overlapped mode (see the 1302 disk drive, below). However, ones attached to a 1410 more likely operated at 34,000 cps – plenty slow enough.
A 1405 Disk Drive spins at 1200 RPM (so only 20 rps) and has a 1000 character track size (so, say 1200 to be conservative). That gives us about (1/20)/1200, or 50ms/1200, or 41 microseconds per character – lots of time.
A 1301 transfers characters at 90,100 cps, or 11 microseconds per character – so plenty of time using every other core storage cycle.
A 1302 transfers characters at 184,000 cps, or 5.4 microseconds per character. But on a 1410, these devices transfer data only in non-overlapped mode (even if the I/O instruction specifies overlapped mode) – because they must use consecutive storage cycles for their data.
A 1311 (the 2311 is not supported) has 2980 characters/track, and rotates at 40ms/revolution. this gives us roughly 13 microseconds per character.
These point to things being OK so long as the peripheral can “steal” every other core cycle. On top of that, the 1410 Channels are double buffered, so even if sometimes it takes 5 cycles to get two characters in or out, operation should not be affected. It would not seem the peripheral speed would prevent using the last option listed.
So, I made the changes, labeling them with a fictitious ECO “JRJ001” in the database and tested – diagnostic CU01 now passes without problems. Below is what the signals look like, timing wise. I believe (but cannot prove) that what happened is that +S E CYCLE REQUIRED ended up delaying until the next possible “last logic gate” (in a given memory cycle), which is typically logic gate E, as is the case in this capture.
E Cycle Required after Installing “ECO” JRJ001
So, what is next on the block?
Several enhancements to the console program, including merging what is now the main root window with the 1415 console form – no need to have them separate.
Run more diagnostics, by saving core images under my software simulator and transferring them to the FPGA memory to read them, as I did with CU01.
Experiments with speeds: how fast can I run the 1411 CPU before it fails its diagnostics?
Research into channel signals. I don’t have ALDs for the relevant IBM 1414 I/O Synchronizers, though I do have ILDs, which pretty well define the logic. But rather than parroting exactly what the 1414s would have done, I will likely just use VHDL using some of that ILD logic as a wrapper around communication to and from the PC support program, at least at first.
With the console typewriter working, and the ability to load core images, I was now ready to try and run some diagnostics. The first issue I ran into was that the main diagnostics, CU01, was initialized for 80K of core. That the core image file was larger wasn’t an issue: the Windows based support program knows to only send the first 40K. However, there was a flag denoting machine size that needed to be “patched” — which I did using my emulator, and then saved as a new core image.
Loading the diagnostic, it typed out its identifier, but then quickly errored out with an Assembly Channel error on a Subtract instruction where the destination B-field was initially positive, but turned negative during the subtraction. This was not the first place I expected to see an issue – figured it would more likely relate to some trigger or other. But nope, this was a simple issue in the Assembly Channel.
The problem arose because the ALD diagrams I have are mostly for an IBM 1410 with the Accelerator special feature, however, most of the ALD diagrams for the Assembly channel proper (ALD 15.50.xx.1) are for the non-accelerated version whereas the Assembly channel controls (ALD 15.49.xx.1) are for the accelerated version. There were several signals that ended up either not being used, or having no source as a result:
-B B CH MIN+INV PLUS SIGN GATED
-B B CH PLU+IN MIN SIGN GATED
-B B MN +IN PL+PL+INV MN GATED
These all relate to cases where the B field ends up with a sign other than its original sign. I suspect that the idea was that these signals provided earlier gating to the assembly channel rather than just deriving them from the adder with additional gate delays.
After fixing the Subtract issues which involved just the “B” bit on page 15.50.06.1, (going from positive to negative) I immediately ran into the same issue on the first pass of the diagnostic during the same test, changing from negative to a positive result. Fixing this involved pages 15.50.05.1 (mostly). As a result the pages for the Assembly channel have some gates who’s note at the top is “FUDGED”. 😉
With that, so long as I didn’t enable I/O overlap and Priority Alert (interrupts) during the test, CU01 completed successfully! Frankly this was something of a surprise: It tests most of the instructions and ways of moving data and they all just worked.
Also, the run time of about 3.75 minutes matches very well with the information in the diagnostic listing for a 1410 with the Accelerated logic feature.
So then, I ran it again, but with overlapped I/O and priority features turned on in the diagnostic. It ran fine for about a minute, but then failed during overlapped execution of a multiply instruction. More on this during the next installment.
After a year messing with other stuff, I finally got back to working on the FPGA implementation of the IBM 1410. With the CPU work essentially done, yet no peripherals, the issue to tackle was how to test the CPU – with no way to load diagnostics.
The solution I came up with was to take memory images I had generated (and could continue to generate) of diagnostics loaded into core (which are generally restartable at location 1) and load them into the FPGA.
Since I didn’t want to integrate this additional “feature” into the existing 1410 memory logic, I chose instead to implement dual port VHDL RAM memory that is underlying what the CPU things of as core, so I could load stuff into it. I then wrote a simple state machine using the existing multi-facet UART interface hardware (which also handles things like console I/O, lights and switches between the FPGA and the PC running the console program) so that it could load memory images from my existing 1410 Simulator. In so doing, I had to swap the top two bits – the simulator has the WM has the high order bit and the C bit as the next lower bit, whereas the FPGA has the C bit as the high order bit.
This turned to be a bit easier than I expected to pull of, and after a week or so of effort, it is now in place.
Loading up the main CPU diagnostic, CU01, it did not get all that far. The Subtract instruction has an issue where it isn’t placing the sign bit over the B field (result) units position – at least it is not doing so when the result sign is different from the original sign. Presumably an error in entering the information from an ALD or a signal misconnection. I suppose it could be the kind of thing that might have happened in the factory during the construction of a real IBM1410 where something was amiss.
Fortunately I can easily reproduce this problem under the Vivado simulator, which provides what amounts to a mult-hundred probe logic analyzer, and am using that to track down the problem.
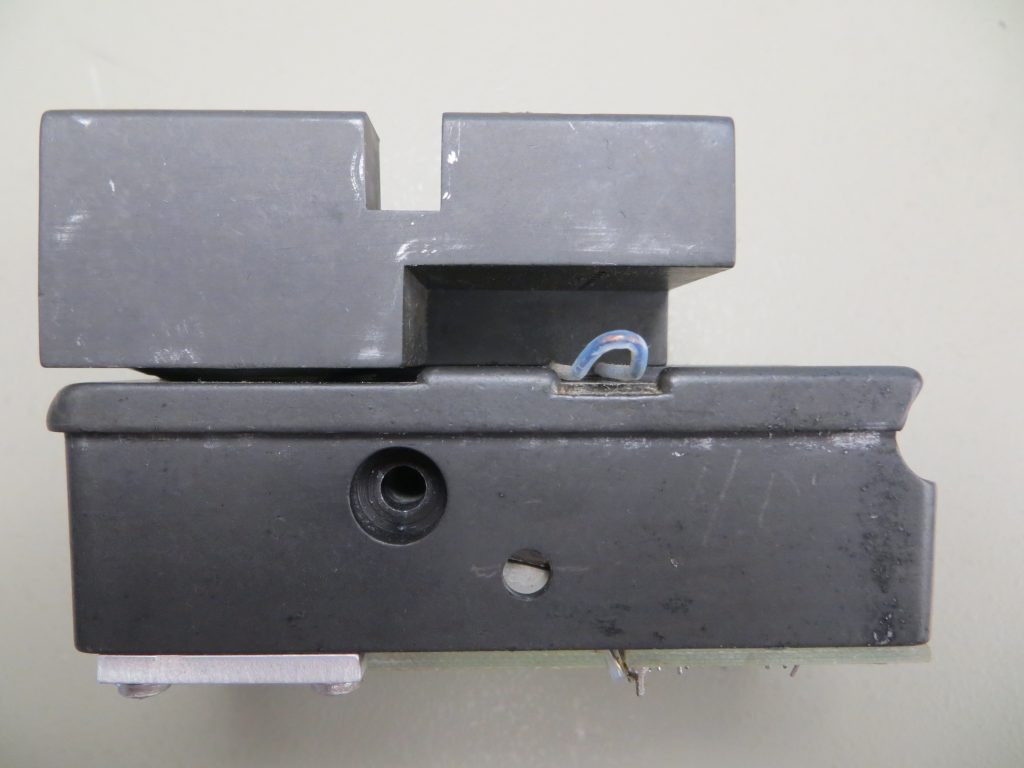
An denizen of the Classic Computer mailing list approached me recently about getting some paper tapes read in. These were BASIC programs from his High School days. At first I tried reading them in my PC05 paper tape read on my PDP-11/34, however that reader has a sprocket feed, and no good place to hold a rolled up tape. I tried 3D printing a spool reel holder and output guide, that that was not successful. So I decided I would try instead to use one of my two HP 2748 paper tape readers – an HP 2748B in particular.
Note that this reader has a capstan (small cylinder to the right) and a pinch roller (the larger black roller to the right) to firmly grip the tape and pull it through the read station. It works pretty well, but I do have to clean it frequently when reading oiled rolled tapes or they start to slip. Fortunately, both the capstan and the pinch roller are metal – no chance for rubber rot turning to “goo” here!
The Arduino “Sketch” described in this post, the PC side perl script, and some perl script tools for working with paper tapes for 8080 machines, PDP-11 and PDP-8 are available for download.
The jig I used to install new grain-of-wheat lamps into the read head is available on Thingiverse .
Like many/most HP devices, this device is absolutely gorgeous inside. Gold plated printed circuit boards (the entire board, not just the contact fingers), lots of space to work inside, easy disassembly and reassembly.
Top view of the HP 2748B Paper Tape Reader Chassis
A Continental Connector for the Interface
The first challenge was the connector. It is a 50 pin connector originally made by Continental. First I bought a Winchester connector off of eBay, but its pins were much too narrow. Then I purchased an AMP connector of eBay, and its pins were just a little bit too narrow. For now, I added solder to the relevant pins to ensure they make contact. Some are still a bit too wide and need some filing down so the connector mates fully, but it works well enough, for now. I will not be leaving this connector attached permanently because of the solder. But I thought it was a better than the alternative of wiring up a second interface connector.
The default logic voltages for the interface are +/- 12V. However, HP also planned for a TTL logic level interface (0 – 5V) by adding a clamping circuit on each interface connection. This clamping is activated by connecting interface pins C and H. Unfortunately, my AMP connector had a coax connector on pin C, so for now I made this connection internal to the reader. When I get some time, I’ll se if I can swap pins so I can make this connection in the way the designers intended.
My plan was to use an Arduino to drive the paper tape reader, and connect to that via TCP/IP, similar to how I did my paper tape simulator.
It’s ALWAYS a Light Bulb
The first thing I did was re-form the capacitors. This turned out to not be necessary. For one thing, most of the power supply capacitors are rated at 5 TIMES to 10 TIMES the expected voltage across them. There was almost no current flow after a minute or two of “reforming”.
The next thing I thought of (thankfully) was to check to see if the illumination in the read head was OK. Well, of course it wasn’t (though the lamps in my other HP paper tape reader, an HP 2748A, turned out to be OK).
Unlike the DEC paper tape readers, these HP readers use a grain-of-wheat lamp for each channel: 10 lamps in all, 8 for the data channels, one for the feed hole, and one additional lamp used for temperature compensation. Clearly at least one was bad, but it turned out to be much more confusing than that.
I had some lamps on hand that are ostensibly for an RK05 positions sensor, but when I tried to replace the lamp I thought was bad (and at that point, I thought it was just one), another one seemed to fail. I took out the lamp I thought was bad, and tested it – and it seemed OK. Put it back in, and it seemed bad. Eventually I figured out that what was probably going on was that the wires on the lamps were so corroded that solder wasn’t taking properly to the leads. Eventually I decided to order some likely replacements off of eBay and replace all of them.
The process of lamp replacement is sufficiently tricky and time consuming that HP service people generally were not expected to do it in the field. The bulbs aren’t listed as replaceable components. Instead, service people / customers were expected to acquire a replacement for the entire read head.
Metal alignment pins at least make the removal and re-installation process relatively straight forward – takes about a minute.
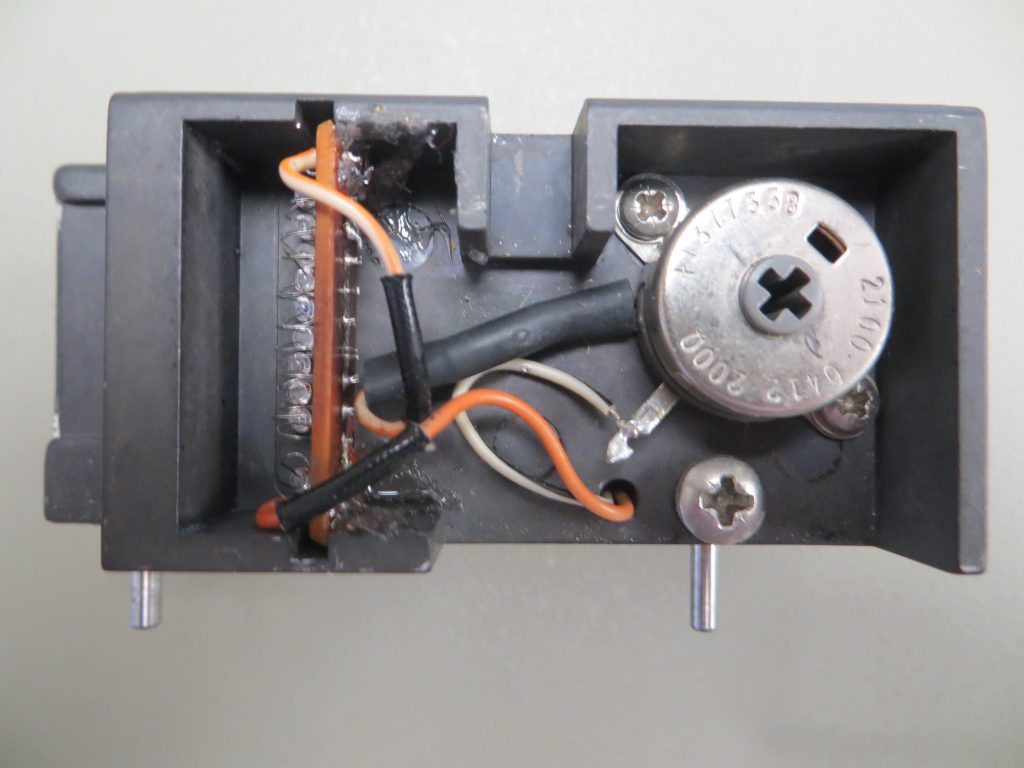
HP 2747B Paper Tape Reader Read Head, Front ViewHP 2748B Paper Tape Reader Read Head, Top View
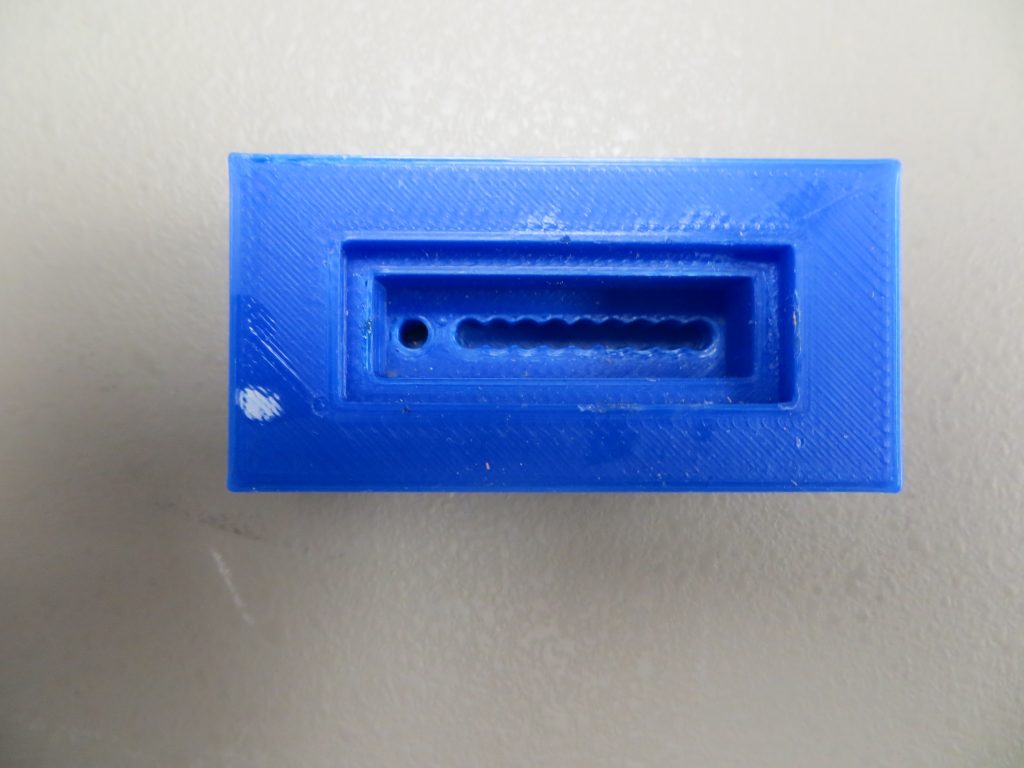
To do the replacement, I removed the little PCB (left side of the photo), unsoldered everything, including the wiring to the rest of the read head, and install new lamps. I had already learned from experience that getting a single lamp into position could be tricky, so I didn’t relish trying to do what with eight of the little wee beasties. In order to assist the installation, I made a 3D printed jig that fit the boards and had a place for each bulb at an appropriate distance from the PCB based on the lead lengths of the original lamps that I had removed.
It still wasn’t easy – at 70 years of age I am pretty shaky at times (and have been more shaky than average my entire life), but it worked well enough. However, since these bulbs are slightly different than the originals, I ended up adding a fixed 1/2 Watt resistor to add some additional resistance. That resistor is inside the black heat shrink tubing that goes from the adjustable resistor in the top view over to the PCB.
Then I used silicone sealant to hold the board in place, much as had been used originally – messy, but effective.
Adjustments, Adjustments
Next, I adapted the “solder enhanced” AMP connector to the tape readers interface connector. That took some trial and error in terms of how much solder to add so that I had good reliable contact. It still isn’t perfect: some are a bit too large right now.
Then I was ready to adjust the read head. Fortunately, there are good instructions in the manual (see the link at the top of this post) for how to do that. I ended up going thru that process several times, but in the end it ended up about where it was after the first time.
During this process I was also able to verify the interface signals were behaving as expected. It took a minute or ten to figure out that the read hole signal would not be present unless the READ button on the reader was engaged. Also, at first, I misunderstood the lamp/bit order – on this reader the feed holes go nearest to the front panel when inserting from left to right – the opposite of a DEC PC-05 reader.
The Arduino Interface
For this application, an Arduino Uno had sufficient interface pins, and unlike the Raspberry Pi, is supports 5V interfacing. The code was relatively straight forward, and uses the same kind of program I used for the paper tape emulator I called out earlier – the PC just makes a TCP connection and sucks up data.
The interface pins for the HP Connector, the Arduino and the Arduino digital signals are all documented at the top of the code, and symbolic constants and macros are in place for handling the Arduino port setup and usage.
There were some things I learned/ tweaked along the way:
At first I tried to stop the reader every time I sent a buffer of data to the PC. However, the clutch and brake on the reader don’t seem to be working quite well enough for that to succeed, so in the end I just streamed the data an “hoped” the Arduino and the TCP connection would keep up – and it seems that they do.
Originally I though I might have some kind of header on each buffer of data I sent, but it occurred to me that TCP is essentially doing that already. The code for that header is in SendBuffer(), but is commented out.
I was having problems with some extra characters, so I added a little time wasting loop to more or less ignore rapid transitions on the h0le signal. That code could probably be improved upon.
It is Working – Trust but VERIFY
After a couple of passes of tweaking the lamp positions and going through the adjustments, the reader reads a DEC test tape pretty reliably – maybe 1 error every 50,000 characters. It also handles both fan folded and wound “round” tape spools well. However, I always try and verify that tapes read correctly, so I wrote some perl scripts to do things like:
Verify 8080 binary tapes (the format is documented in the script)
Verify 8 Bit Intel HEX tapes
Verify Even parity text tapes
Verify PDP-8 binary format tapes
You can download a Zip archive with these tools, the Arduino Sketch and the PC side Perl script here.
One More Problem – There’s Always at Least One
As I started reading in tapes, starting with the DEC test tapes (MAINDEC-00-D2G2-PT and MAINDEC-00-D2G4-PT) things were fine. As I proceeded to read in some 8080 binary tapes, I started having some issues with the high order bit. That was easy to fix – the lamp was slightly miss-aligned.
I also found finding the balance between not having data errors (dropped bits) and having duplicated characters a little tricky – it took me a few passes doing the adjustment procedure described in the HP manual to get it working well.
However, I then discovered one more problem. Sometimes it would drop some of the null characters appearing in a blank area of tape after the initial leader. The HP 2748B has a special circuit that causes it to intentionally drop leader nulls – once you hit the READ button, it drops nulls until the first character. After trying this and that (including running through the adjustment procedure yet again), it occurred to me that maybe that circuit was firing, causing the reader to drop nulls.
I connected several signal lines to a connector that I thought might be useful in order to scope them (and not have to keep moving the scope probe around the board, as I have no extenders for these connectors), and quickly confirmed my suspicion. I tried a lot of things – including swapping some of the four identical transistors (two for a flip flop, and two more acting as signal inverters) so that the flip flop would have matched transistors, to no avail. I also tried replacing the capacitor that connects to +12V that resets the flip flop on power up (in case the READ button is already pressed). Nothing seemed to help.
I noticed on the oscilloscope that the length of time before the circuit fired when it shouldn’t was kind of random. Could this be noise? Connecting a .1uf bypass capacitor on the +12V line feeding the reset circuit was the first thought, but that was going to be harder to do on the board than I preferred. In the end, I hooked up the capacitor from the base of the reset signal inverter Q13, and that cured the problem.
Now the reader is generally reliable so long as I keep the read head, capstan and pinch roller clean.